李泽昊
我设计并制造机器人——从减速箱、轮组到全身控制的轮腿双足平台。 纽约大学机电、机器人与自动化工程硕士在读;曾任同济大学 Superpower RoboMaster 战队机械组负责人,带领 20 人设计团队征战三个赛季。工作横跨机械设计、物理仿真 (MuJoCo、Simscape)与面向操作任务的强化学习。
研究与独立项目

微重力机器人与双臂操作平台
主导 ATMOS 开源版本与 RRL M3 双臂操作平台的机械评审与结构重构,并用 MuJoCo 仿真完成工作空间分析与设计验证。

面向操作任务的强化学习
从零实现 Q-Learning 与 DQN,用于机械臂操作实验(含开抽屉任务),配套 MuJoCo 仿真环境。
轮腿式双足机器人
基于 LQR 全身控制框架的高动态两轮腿双足平台,五连杆腿部构型。我负责全部机械设计: 连杆综合、杆长优化与电机选型。
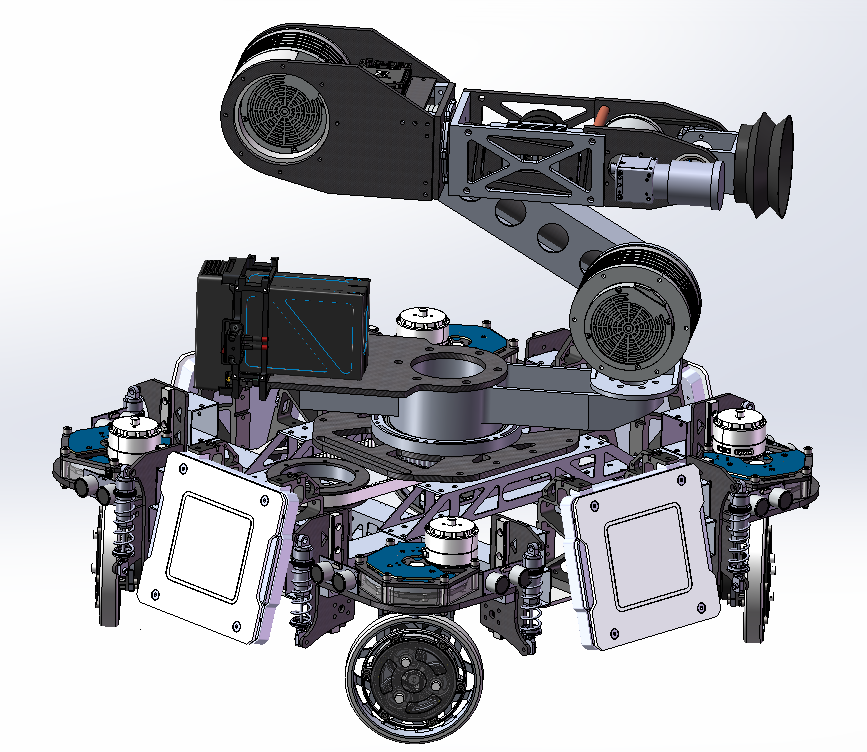
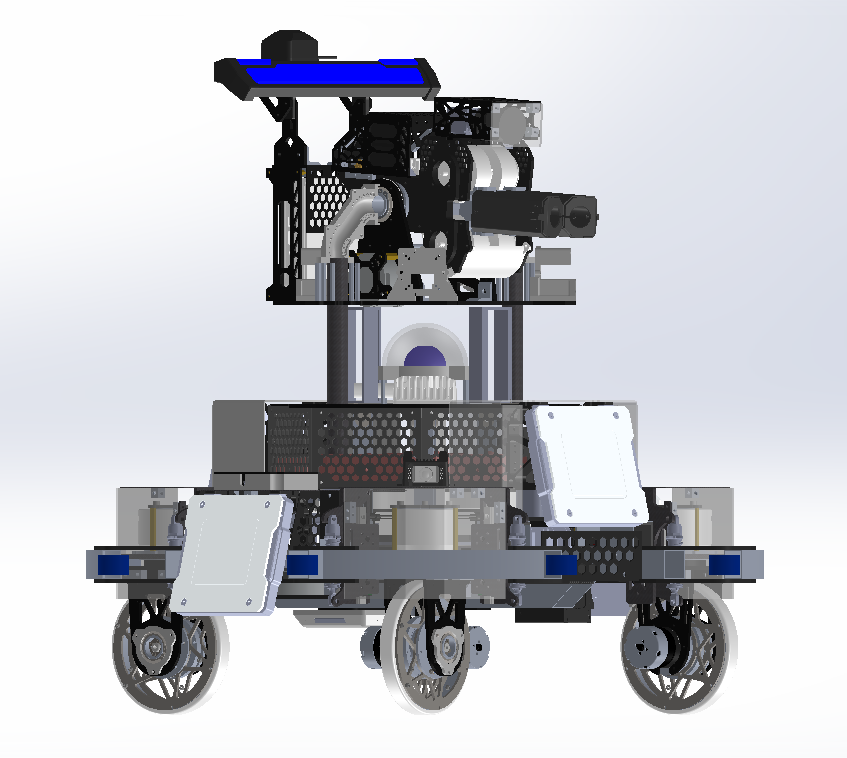
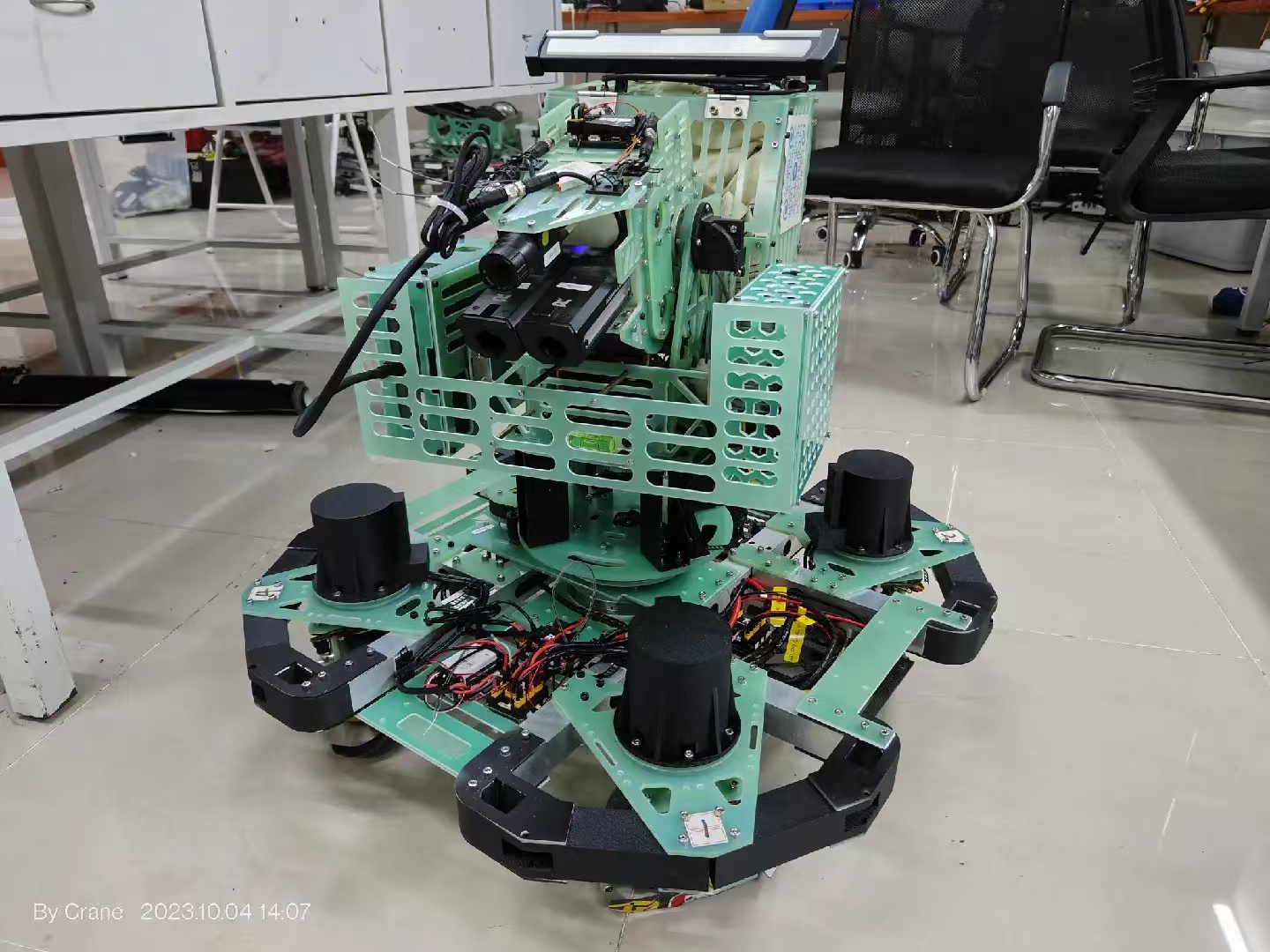
同步驱动底盘 + 5 自由度机械臂
四个同步驱动轮组构成全向底盘,搭载 yaw-pitch-pitch-roll-yaw 五自由度机械臂。 机械之外,编码器/配电 PCB、STM32 底盘运动学与 PID 控制、YOLOv7 识别也由我完成。
工业界经历

人形机器人仿真与机构研究
围绕 Ultron V3.0 人形机器人的仿真与机械研究:基于 GJK 碰撞检测的工作空间分析、 MuJoCo/Simscape 全身关节力矩研究,以及基于 RoboGrammar 的构型优化。

人形头部与灵巧手工程化
基于人体运动学约束设计 3 自由度颈部稳定机构;外骨骼臂静力学仿真与 CNC 结构优化;20+ 自由度灵巧手动态负载耐久测试。

医疗机器人毛囊夹持机构
主导植发机器人毛囊夹持机构的重新设计:减少电机依赖、提升空间效率, 并设计了经仿真验证、直接投产的弹簧锁止机构。
竞赛机器人 — RoboMaster
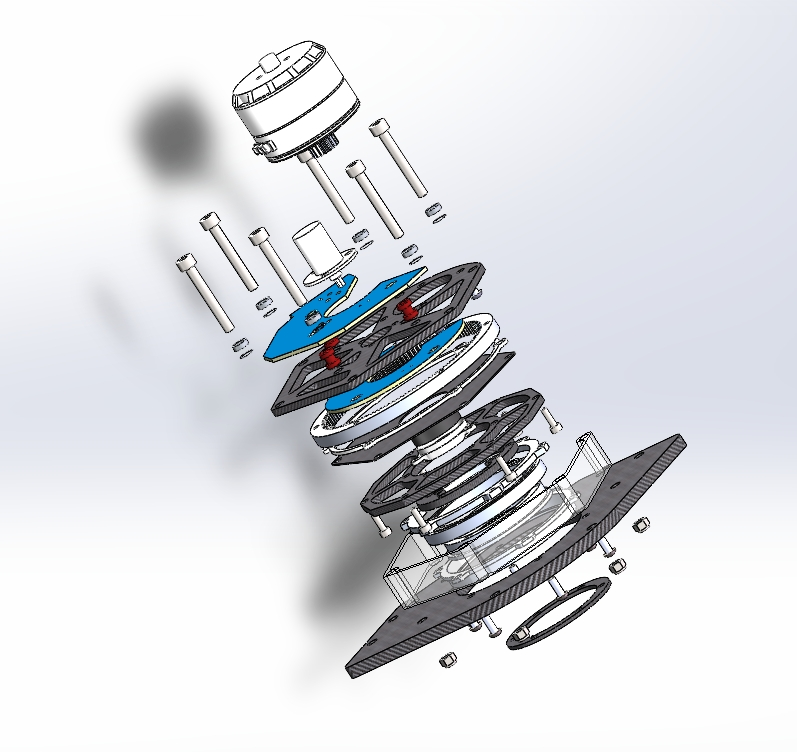
传动系统深潜:轮组与行星减速箱
四代同步驱动轮组——从 Watt 连杆悬挂到一体化轮毂电机——外加从零设计的 2K-H 行星减速箱(10.16:1)。减重 45.5%,底盘小陀螺 1.0 秒/圈 → 0.3 秒/圈。
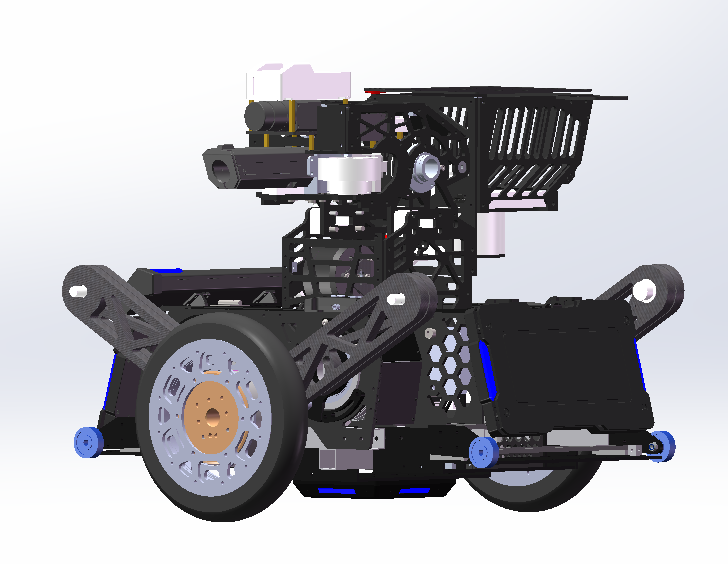
RoboMaster 哨兵机器人 · 2025 赛季
第三代哨兵:在成熟的 2024 架构上系统性推进板件轻量化与整机稳定性提升, 再夺全国赛哨兵兵种一等奖。
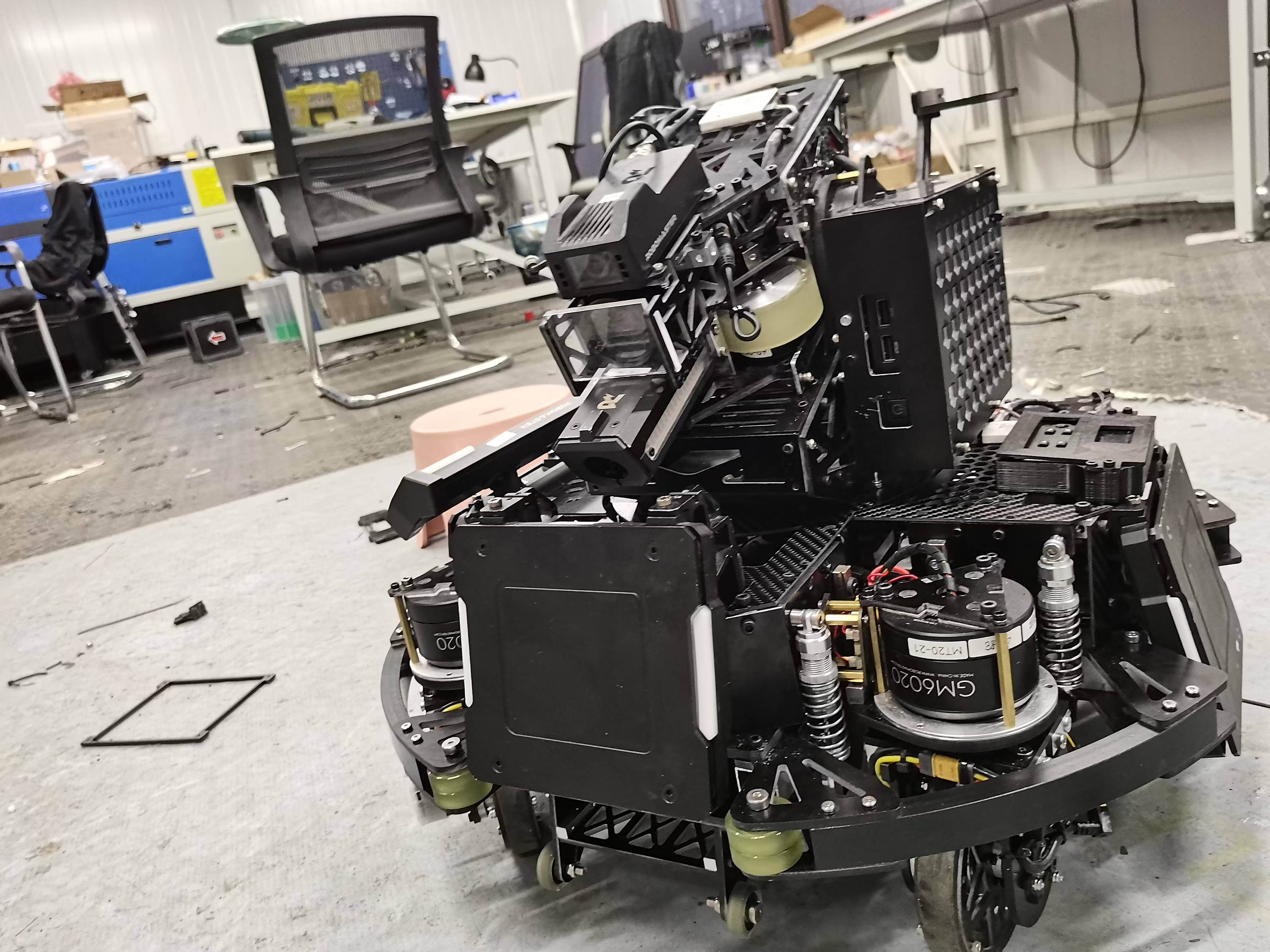
RoboMaster 哨兵机器人 · 2023–2024
从零设计的自主哨兵:自研同步驱动底盘 + 激光雷达导航;第二赛季全面迭代—— 轮组减重、云台质心归轴、五相机环视感知与悬挂调校。
RoboMaster 步兵机器人 · 2024
以自研同步驱动传动系统重构 2019 年遗留的麦轮平台。弹仓移至 yaw 轴上, 云台转动惯量降低超 40%;底盘 100W 功率限制下小陀螺转速达 0.3 秒/圈。