同步驱动底盘 + 5 自由度机械臂机器人
角色与核心贡献
独立全栈打造全向移动操作平台,覆盖机械、电控、控制与感知四个方向。
- 完成同步驱动底盘与 5 自由度机械臂的机械设计,从 CAD 到硬件;
- 设计双板编码器/配电 PCB;
- 实现 STM32 底盘运动学与 PID 控制,以及机械臂正逆运动学;
- 集成 YOLOv7 识别,打通从感知到运动的闭环。
概述
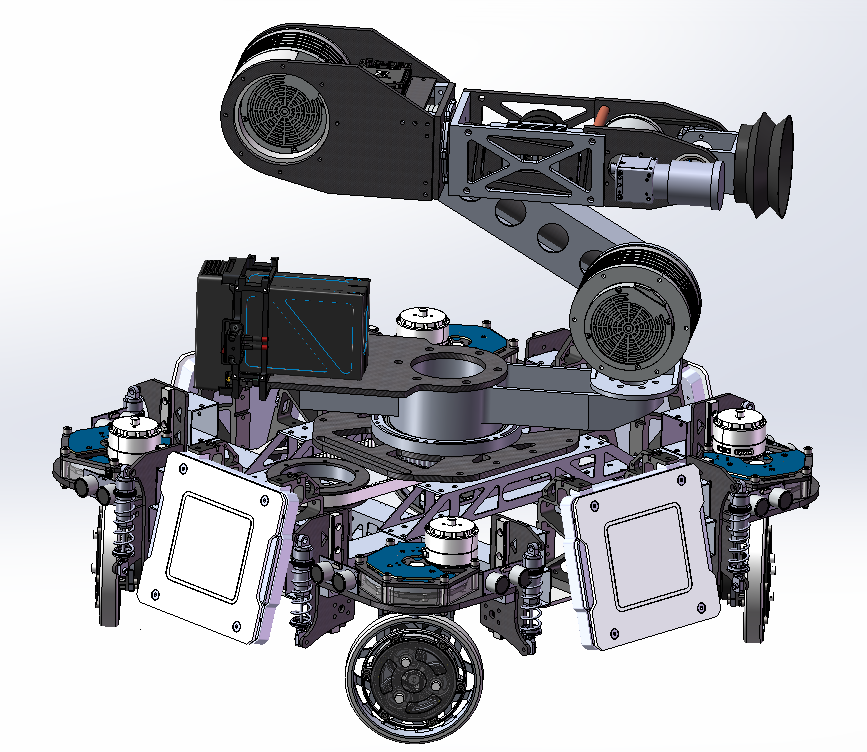
一台横跨四个学科的移动操作机器人:机械设计、PCB 设计、控制与视觉识别。 底盘由四个同步驱动轮组实现全向移动,同步带驱动云台第一 yaw 轴;机械臂为 yaw-pitch-pitch-roll-yaw 五自由度构型,以应对更复杂的作业条件。
机械
机器人将我为竞赛机器人开发的同步驱动轮组与减速箱设计 (详见传动系统深潜)集成进紧凑底盘,云台上搭载五自由度串联臂。
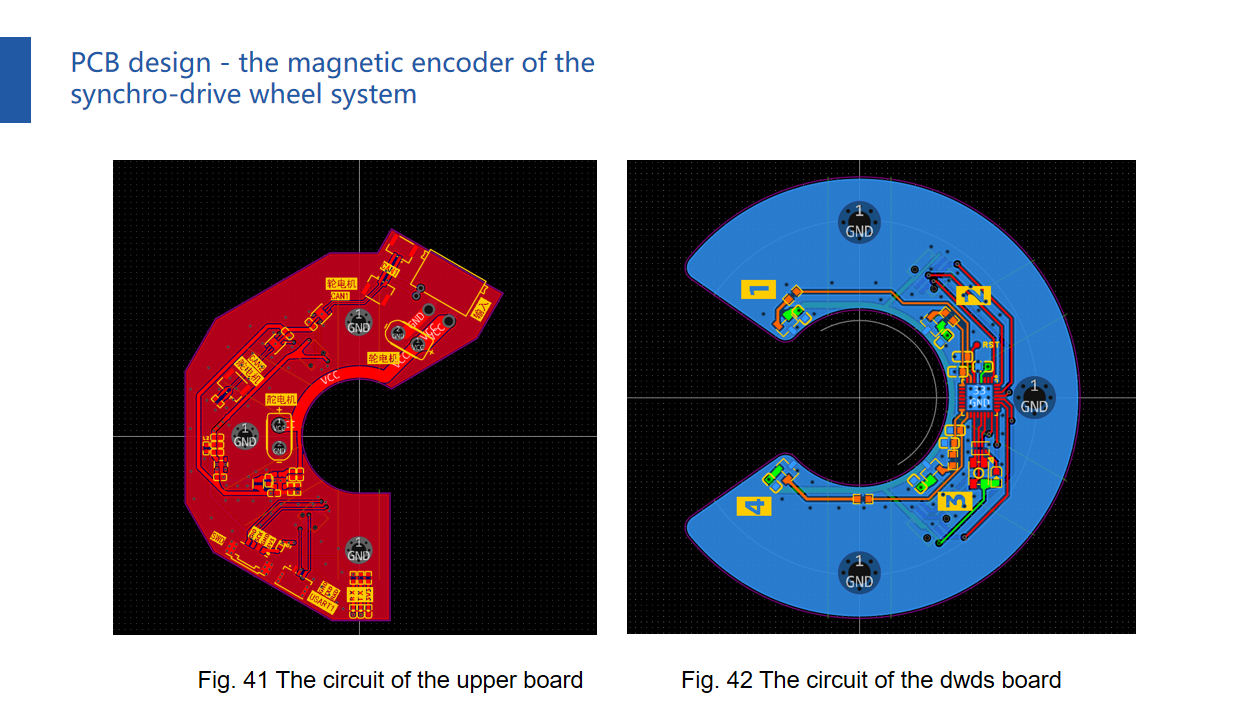
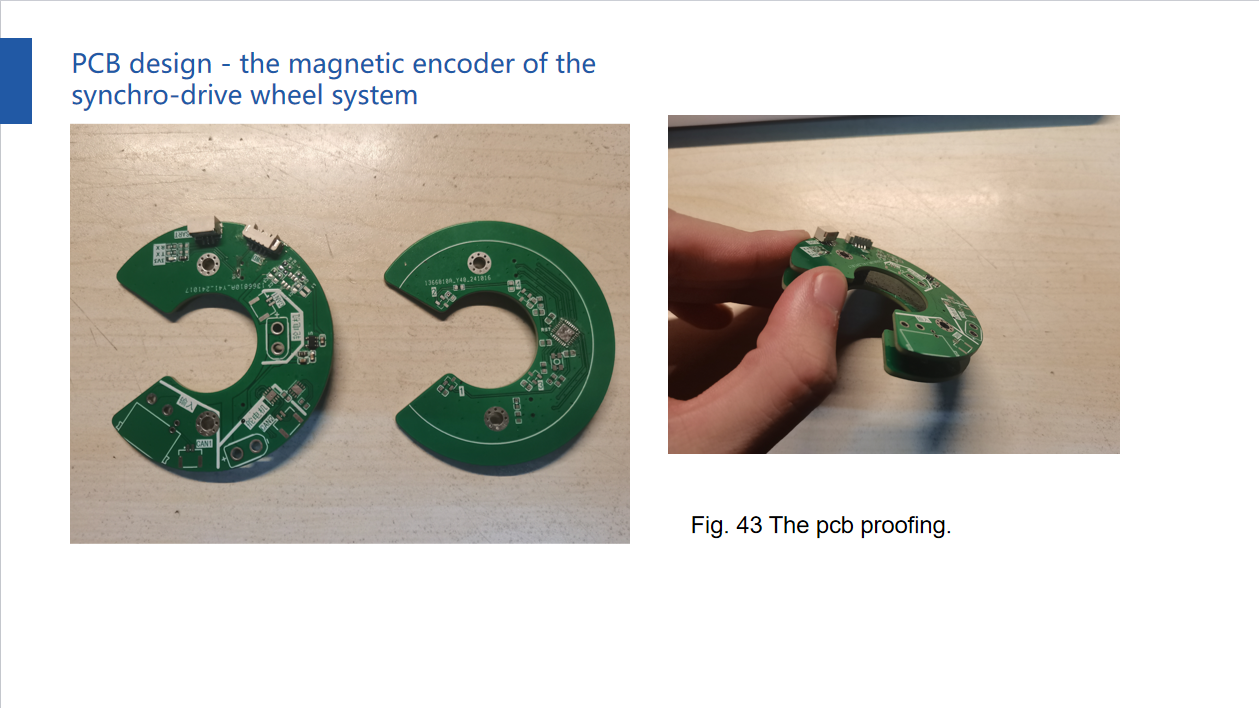
电子
我设计了双板 PCB 组件,兼作轮组转向轴的磁编码器与配电板。上板把底盘总线电压降压给 M3508 驱动与转向电机,并转发位置数据与 CAN 报文;下板搭载编码器芯片与四个霍尔元件, 读取随轮组驱动部分旋转的磁环,输出转向角信息。
控制与视觉
- 推导全向底盘运动学模型,用 STM32CubeMX 在 RoboMaster C 板(STM32F407IGHx)上 搭建控制框架,含 CAN 通信与 PID 控制环。
- 实现五自由度机械臂位置的正、逆运动学求解。
- 部署 YOLOv7 实现目标识别。
图片