传动系统深潜:四代同步驱动轮组与自研行星减速箱
两个赛季内独立设计一整套全向底盘传动系统——四代轮组与一台从零设计的行星减速箱, 现为战队哨兵与步兵机器人提供动力。
- 设计 Watt 连杆悬挂轮组(v1),仿真 60 mm 连杆达 42.7 mm 垂向行程、横向偏差 <±0.1 mm, 采用低成本 FR4 玻纤连杆兼顾刚度;
- 实战轴系失效后重构可靠性(v2),删除 Watt 连杆并加装两根铜柱增刚,实现沥青、玛蹄脂与瓷砖地面稳定运行;
- 推进集成化与减重(v3),将轮圈、侧板与固定套合并为单体 CNC 件、轴承组由 3 减至 1, 整体减重 45.5%(2.2 kg → 1.261 kg);
- 打造准轮毂电机(v4),将 1:7 环齿级嵌入 GM6020 空心电机并配自研磁编码器 PCB,彻底取消联轴器;
- 按实测力矩反推设计从零自研 2K-H 行星减速箱(10.16:1),将底盘小陀螺由 1.0 秒/圈降至 0.3 秒/圈。
为什么要做
麦克纳姆轮浪费功率也浪费重量。两个赛季里,我设计、弄坏、再重新设计出一整套全向传动 系统——四个大版本的轮组和一台从零设计的行星减速箱——如今驱动着战队的哨兵与步兵机器人。
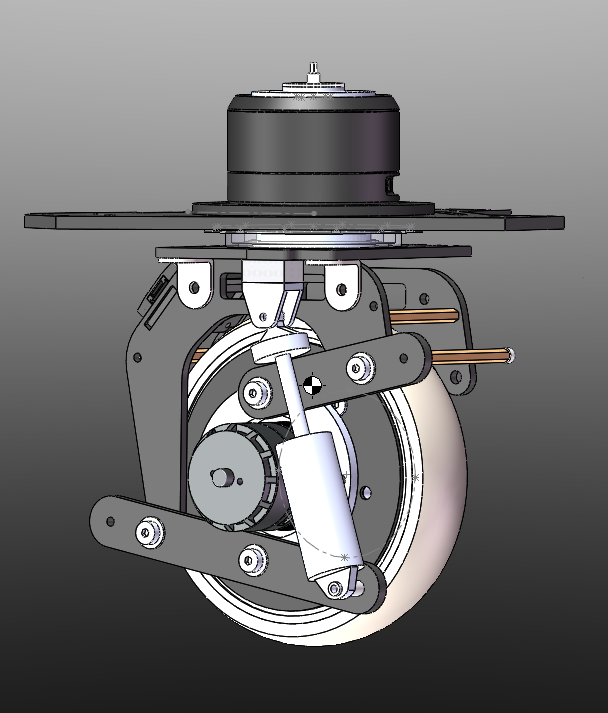
v1 — Watt 连杆悬挂
第一版把悬挂布置在轮组驱动部分,通过 Watt 连杆让转向部分与底盘框架刚性连接, 同时降低簧下质量。60 mm 连杆的仿真结果:轮心垂直行程 42.7 mm 时横向偏差小于 ±0.1 mm—— 既给弹簧留足压缩行程,又不牺牲轮组定位。连杆材料选 FR4 玻纤板:刚度够用,成本远低于碳板。
v2 — 可靠性重构
实测中 v1 的轴系反复损坏——插接轴壶在压力测试下失效,悬臂梁式的驱动部分在大冲击下 有分离风险。v2 取消 Watt 连杆,加入两根铜柱增强刚度。130 mm × 20 mm 车轮包胶 7.5 mm、 硬度 90A,在沥青、胶质与瓷砖地面都能稳定行驶。
2023 赛季后的复盘
- 单套轮组约 2.2 kg,把整机推到 25 kg,加速度比对手低约 15%。
- M3508 P19 电机力矩过剩但限制了极速——减速比与工况不匹配。
- 电机总长 98.4 mm,导致转向回转半径达 71 mm,比轮子半径大出 12.5 mm。
- 市面上没有同时满足体积、重量与力矩需求的轮毂电机——只能自己造一个。
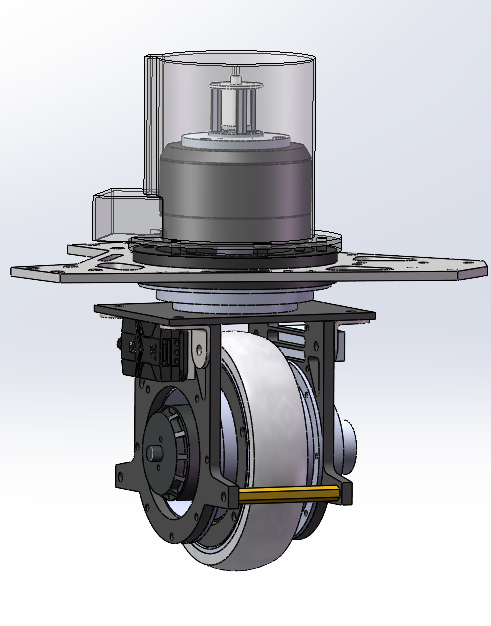
v3 — 集成化与减重
2023 年夏天的再设计聚焦零件集成:胀套替代 D 形联轴器,金属直角转接件增强驱动部分刚度, 轴承从三组减到两组、最终一组——同时放宽了 CNC 件的加工精度要求、降低成本。轮辋、侧板与 胀套固定件合并为单个 CNC 零件。包胶减薄至 5 mm、硬度改为 60A 以保证抓地力。 结果:单套 1.261 kg,减重 45.5%。
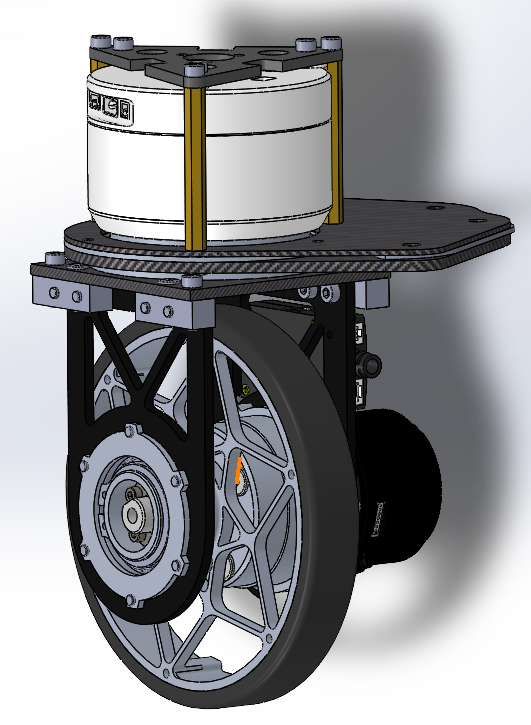
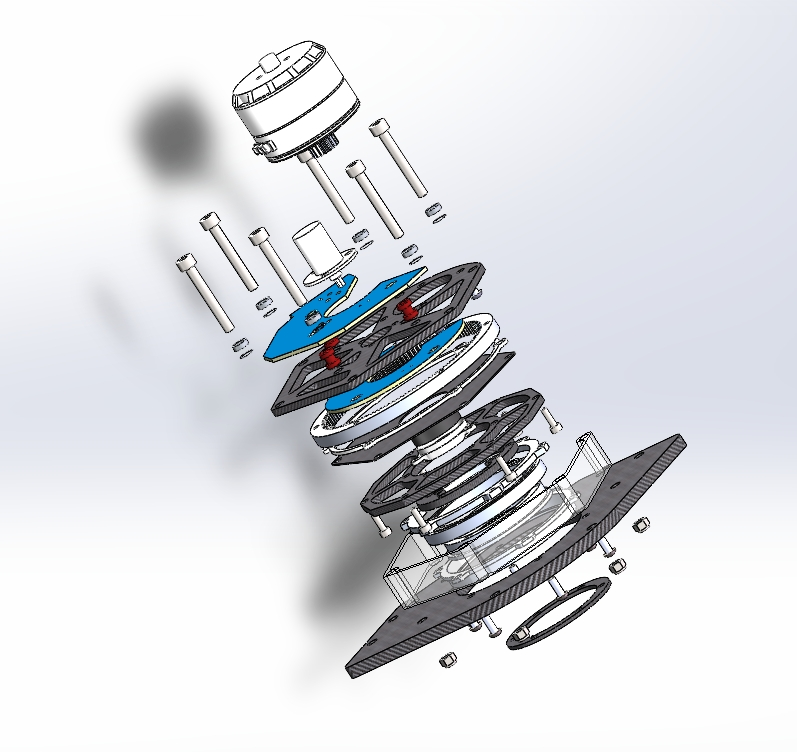
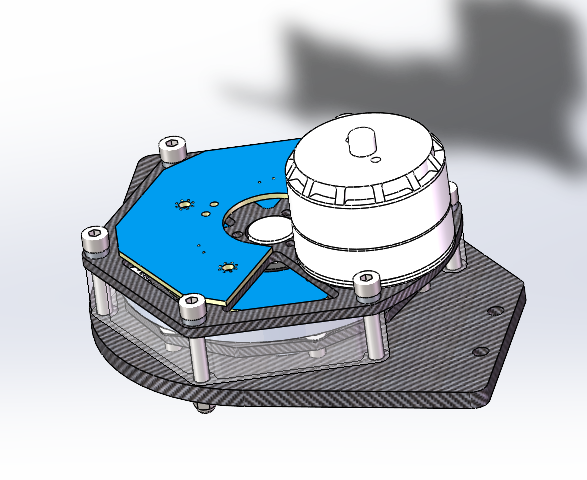
v4 — 事实上的轮毂电机
最终版把 1:7 齿圈级集成进 GM6020 中空电机,彻底取消联轴器,内部空间留给滑环和自研 磁编码器 PCB。双板编码器组件用橡胶减振垫圈安装、五处对位连接,保证工作载荷下两板不分离、 不振荡。
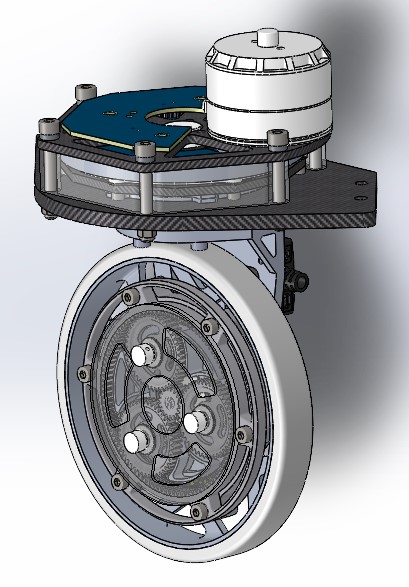
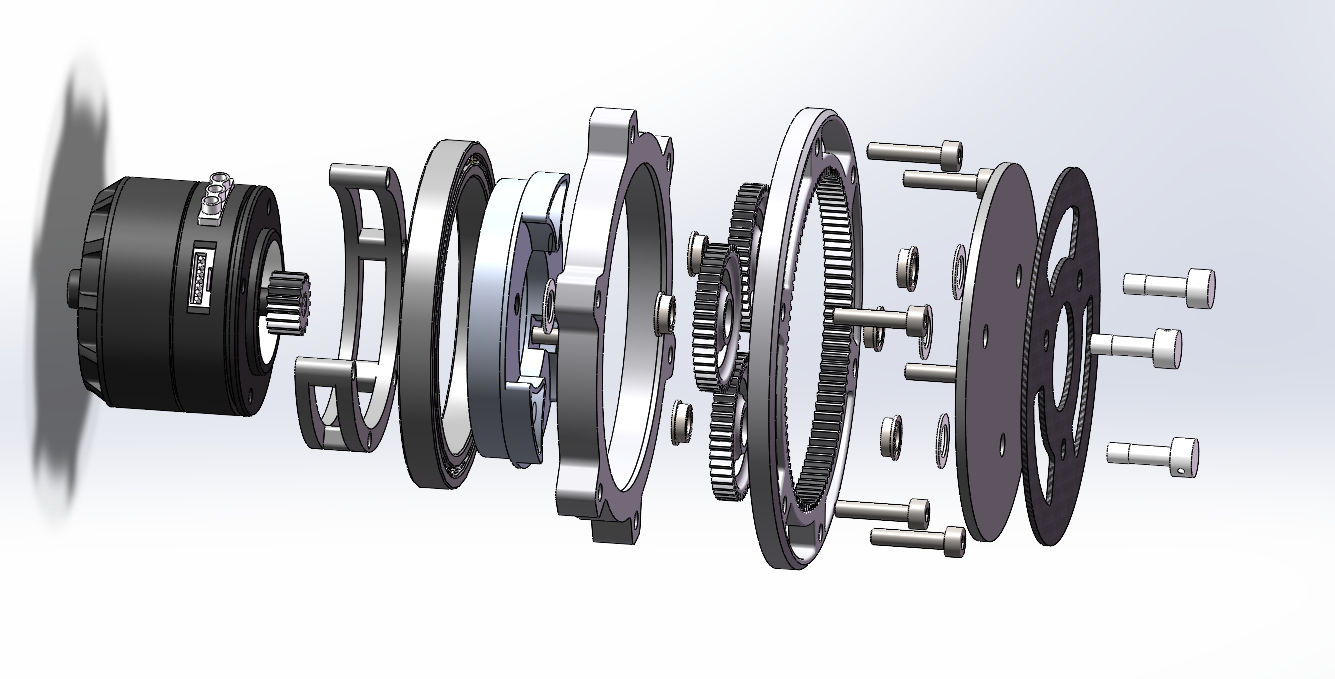
行星减速箱
从约 20 kg 机器人的轮毂电机实测力矩(约需 1.5 N·m)反推,设计了 119 齿齿圈的 2K-H 行星级,最终传动比 10.16:1。最初考虑摆线减速器(同空间减速比更大),但标准件限制了设计, 权衡后改为结构更简单的行星方案。单侧轮毂兼作轴承外挡边,整个减速级成为车轮的一部分。 全部零件采用 6061-T6——预算约束下的激进选择——齿厚 4 mm,起动力矩校核留有冗余 (M3508 起动力矩 4.4 N·m,折算到驱动端 0.232 N·m)。
结果:相近工况下,底盘小陀螺用时从 1.0 秒/圈降至 0.3 秒/圈(对比麦轮基线)。
图片与视频