RoboMaster 哨兵机器人:从零设计到全国一等奖
角色与核心贡献
从哨兵组队员(2023)成长为哨兵机械组负责人(2024),完成横跨两个赛季的夺冠设计。
- 从零设计同步驱动底盘与轮组;
- 云台质心归轴消除小陀螺漂移,实现解耦旋转稳定不漂移;
- 主导第二赛季轻量化(轮组减重 45.5%)与五相机环视感知布局,助力全国赛哨兵兵种一等奖(2023)。
背景
在 RoboMaster 高校联盟赛中,哨兵是全队唯一的全自主机器人:无人操控,需要自主导航、 感知并交战。2023 赛季初规则大改,旧哨兵设计整体作废,只能从零重新设计。
2023 赛季 — 从 0 到 1
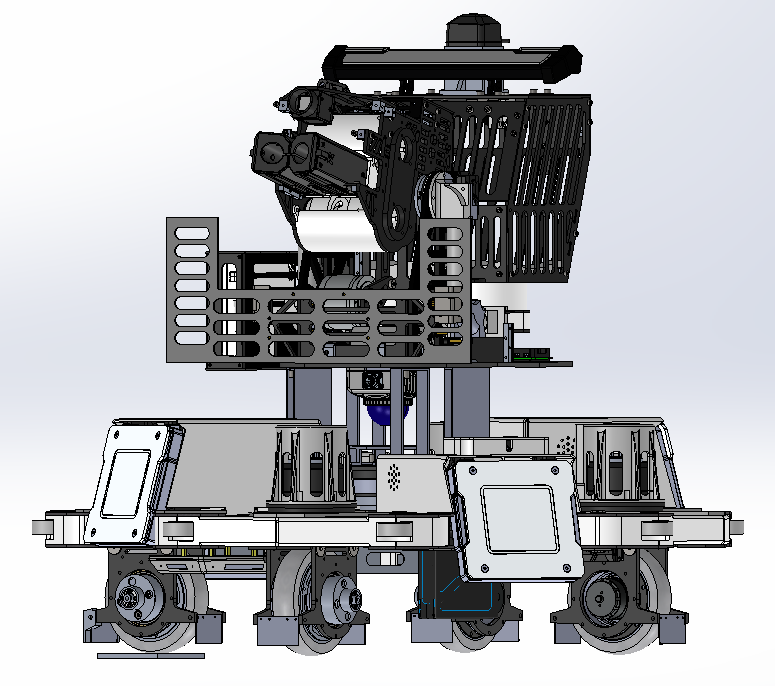
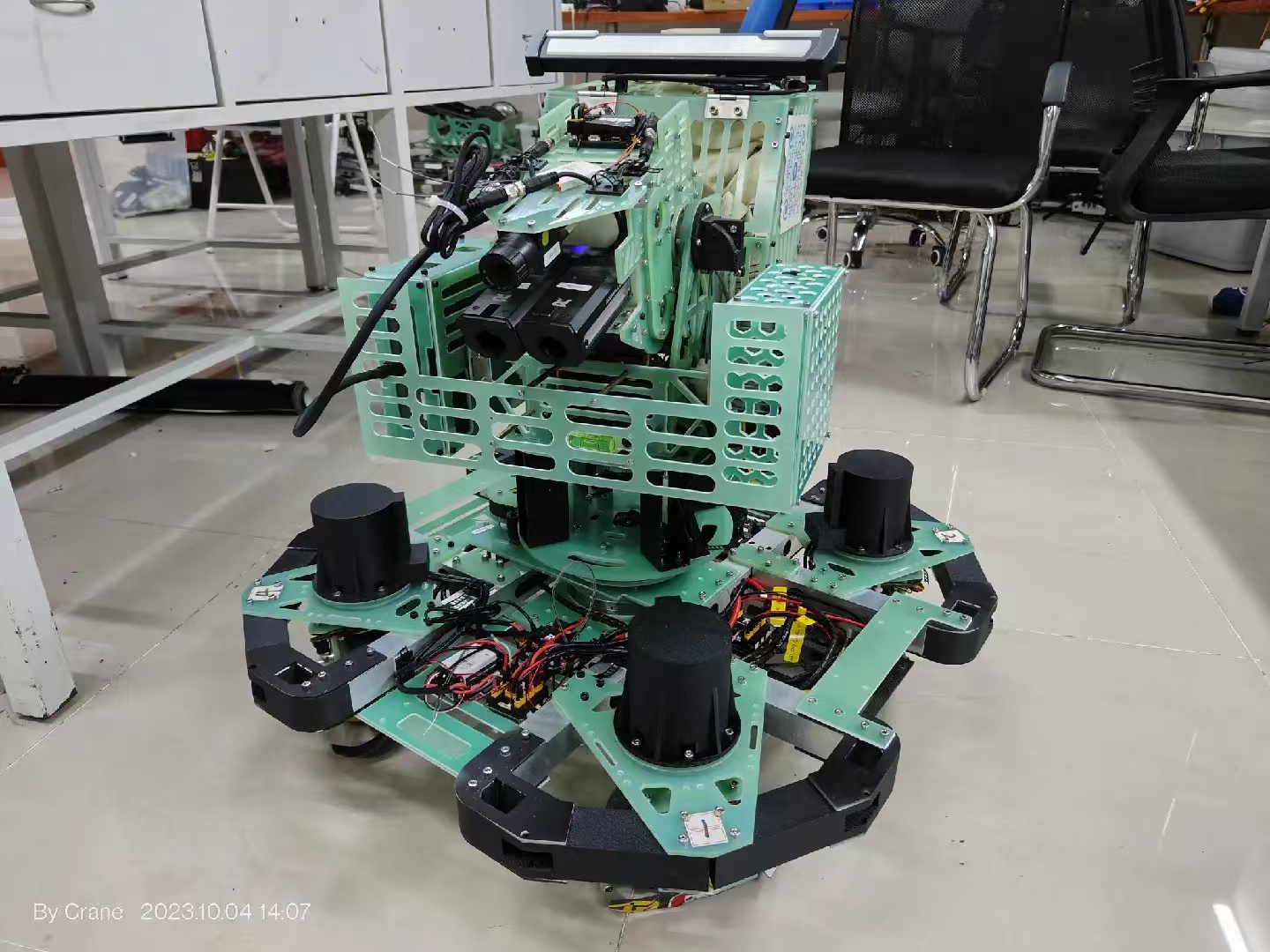
麦克纳姆轮的摩擦功耗显著,因此底盘采用自研同步驱动轮系 (详见传动系统深潜)。规则包络内并列布置双发射机构, 云台 yaw 轴中心布置 Livox MID-360 全向激光雷达用于建图与导航。该机器人的赛场表现 为战队拿下全国赛哨兵兵种一等奖。
赛后复盘
比赛暴露了 v1 机器人的三个问题:
- 超重。整机顶到 28.5 kg 的级别上限,玻纤板需换碳纤维。
- 云台质量偏轴。弹仓偏置于云台一侧导致重心侧移——底盘小陀螺、云台解耦时 整机向后漂移。
- 精度与联调。发射精度以及机械-电控联调需要系统性打磨。
2024 赛季 — 迭代
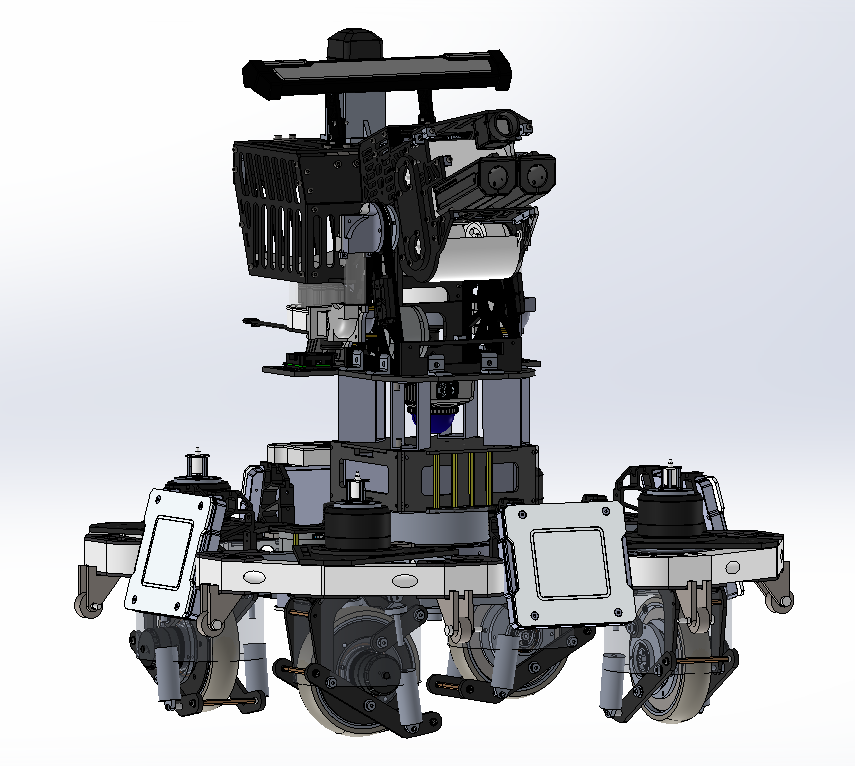
- 发射舱归位至 yaw 轴中心,降低云台转动惯量,根除小陀螺漂移。
- 两版新轮组直击底盘最重的子系统——单套轮组减重 45.5%;结构板件逐一静力学分析继续减重。
- 重新设计 yaw 轴系,简化赛间换轴承流程。
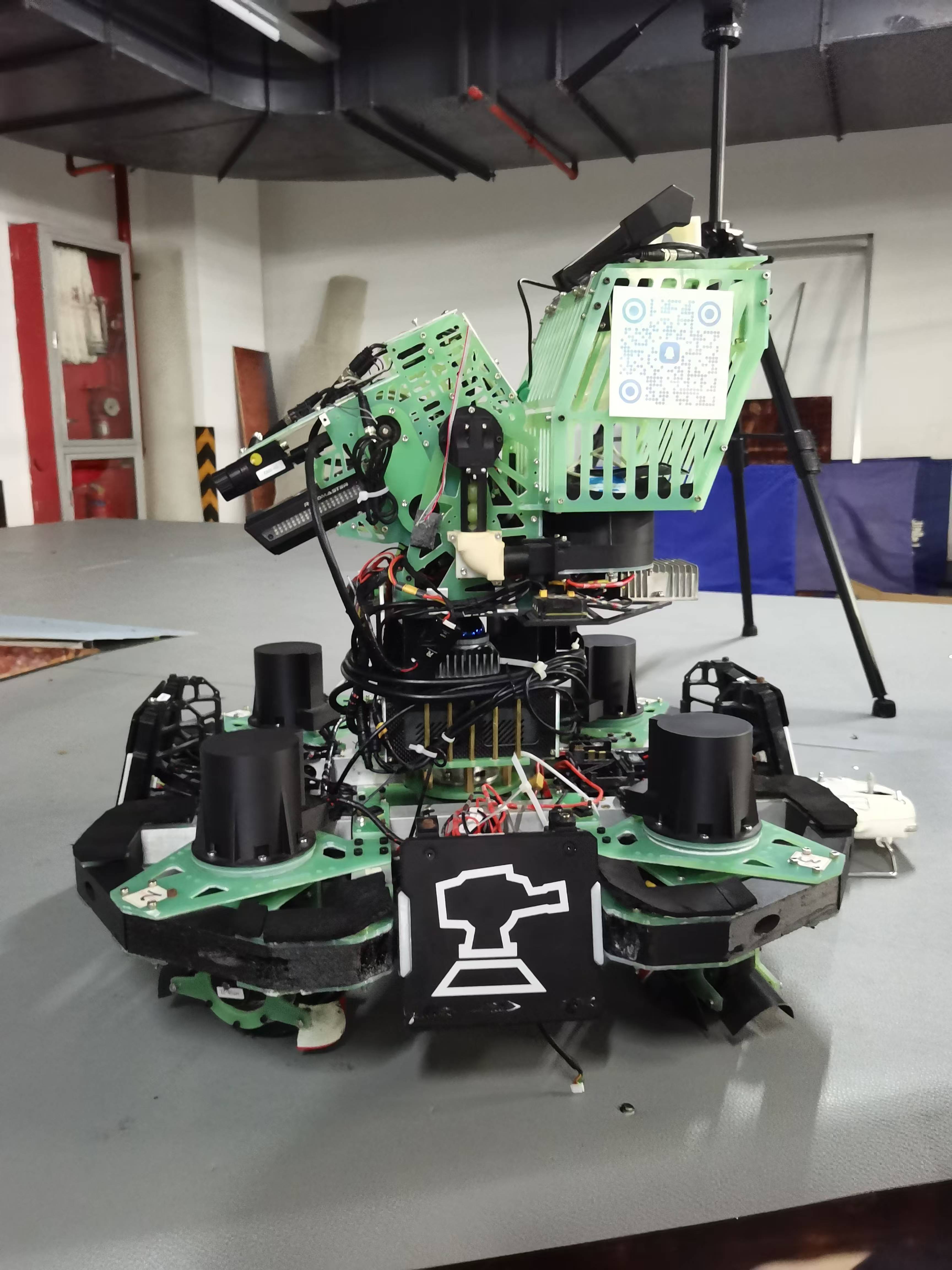
- 新增全向感知:yaw 轴上布置五相机环视系统。
- NUC 计算单元重新布局兼作配重,云台配平的同时降低整机重心;悬挂系统按工况调校。