高动态轮腿式双足机器人
角色与核心贡献
动态平衡双足机器人的机械设计负责人;电控与 LQR 控制栈由队友完成。
- 综合五连杆腿部几何并优化杆长,匹配目标运动范围;
- 依据动力学仿真的力矩需求完成执行器选型;
- 设计底盘结构,支撑 LQR 全身控制下的横滚调整、动态行驶与起立恢复。
概述
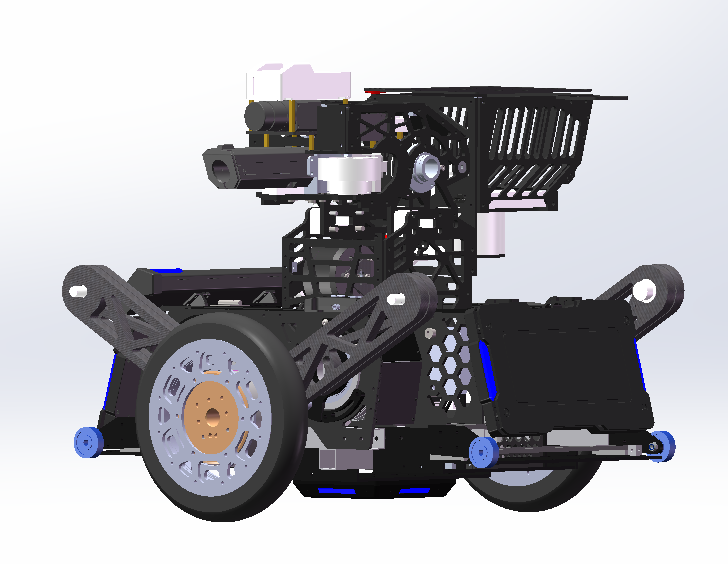
一台为"复杂地形不减速"而生的两轮腿双足机器人。每侧为三执行器五连杆腿, 平衡与姿态由基于 LQR 的全身控制框架管理。稍作修改后,同一架构可作为 RoboMaster 中的"平衡步兵"参赛。
我的角色
我负责全部机械设计:五连杆腿部机构的综合与杆长优化、执行器力矩核算与电机选型、 底盘结构设计。队友开发电控与 LQR 控制栈——机械设计的任务是给控制器一个"值得控制"的对象: 低腿部惯量、干净的关节运动学、工作在高效力矩-转速区间的执行器。
设计要点
- 五连杆几何经调校,使悬挂行程内轮接触点近似沿垂线运动,保证 LQR 控制器 线性化模型的精度。
- 执行器选型基于动力学仿真的关节力矩需求映射到电机力矩-转速曲线,而非仅按静态 最坏工况估算。
- 机器人可演示横滚调整、动态行驶与从下蹲起立恢复(视频如下)。
图片与视频