High-dynamic wheeled-legged bipedal robot
Owner of the mechanical design for a dynamically-balancing biped; teammates built the electronics and LQR control stack.
- Synthesized the five-link leg geometry and optimized rod lengths for the target motion envelope;
- Sized the actuators from dynamic-simulation torque requirements;
- Designed the chassis structure, enabling roll adjustment, dynamic driving, and stand-up recovery under LQR whole-body control (videos below).
Overview
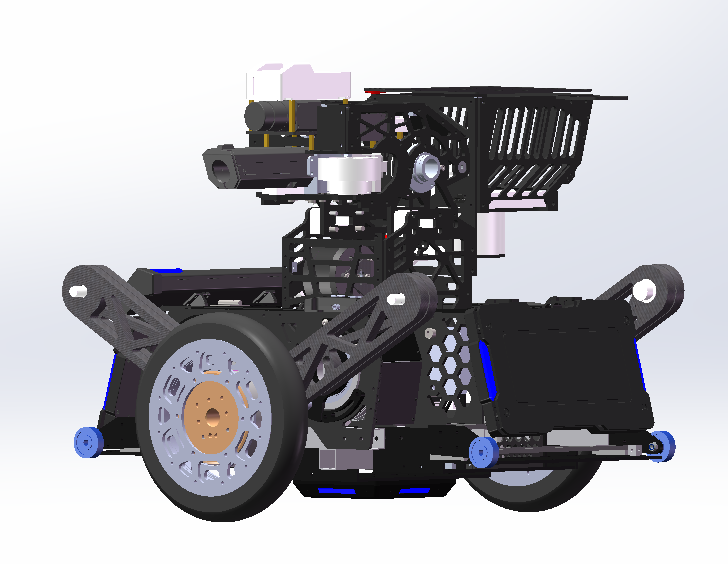
A two-wheel-leg bipedal robot built to handle complex terrain without giving up speed. The platform uses a three-actuator, five-link leg on each side, with balance and posture managed by an LQR-based whole-body-control framework. With minor modifications, the same architecture serves as a "balance infantry" robot in RoboMaster competition.
My role
I owned the mechanical design: synthesis and rod-length optimization of the five-link leg mechanism, actuator torque sizing and motor selection, and the structural design of the chassis. Teammates developed the electronics and the LQR control stack — the mechanical design had to give the controller a plant worth controlling: low leg inertia, clean joint kinematics, and actuators operating in their efficient torque–speed region.
Design highlights
- Five-link leg geometry tuned so the wheel contact point tracks a near-vertical line through the suspension travel, keeping the linearized model accurate for the LQR controller.
- Actuators selected by mapping required joint torques from dynamic simulation onto motor torque–speed curves, rather than by static worst-case sizing alone.
- The robot demonstrates roll adjustment, dynamic driving, and recovery to standing from a crouch (videos below).
Media