Zehao Li
I design and build robots — from gearboxes and wheel sets to whole-body-controlled bipeds. M.S. student in Mechatronics, Robotics and Automation Engineering at New York University. Formerly mechanical sub-team lead of Tongji University's Superpower RoboMaster team, where I led a 20-person team through three competition seasons. My work spans mechanical design, physics simulation (MuJoCo, Simscape), and reinforcement learning for manipulation.
Research & independent projects

Micro-gravity robot & bimanual platform
Mechanical review and restructuring for the ATMOS open-source release and the RRL M3 bimanipulation platform, with MuJoCo simulation for workspace analysis and design validation.

Reinforcement learning for manipulation
Q-Learning and DQN implemented from scratch for robotic-arm manipulation experiments, including drawer-opening tasks, with MuJoCo simulation environments.
Wheeled-legged bipedal robot
A high-dynamic, two-wheel-leg biped on a five-link chassis under an LQR whole-body-control framework. I owned the mechanical design: linkage synthesis, rod-length optimization, and actuator selection.
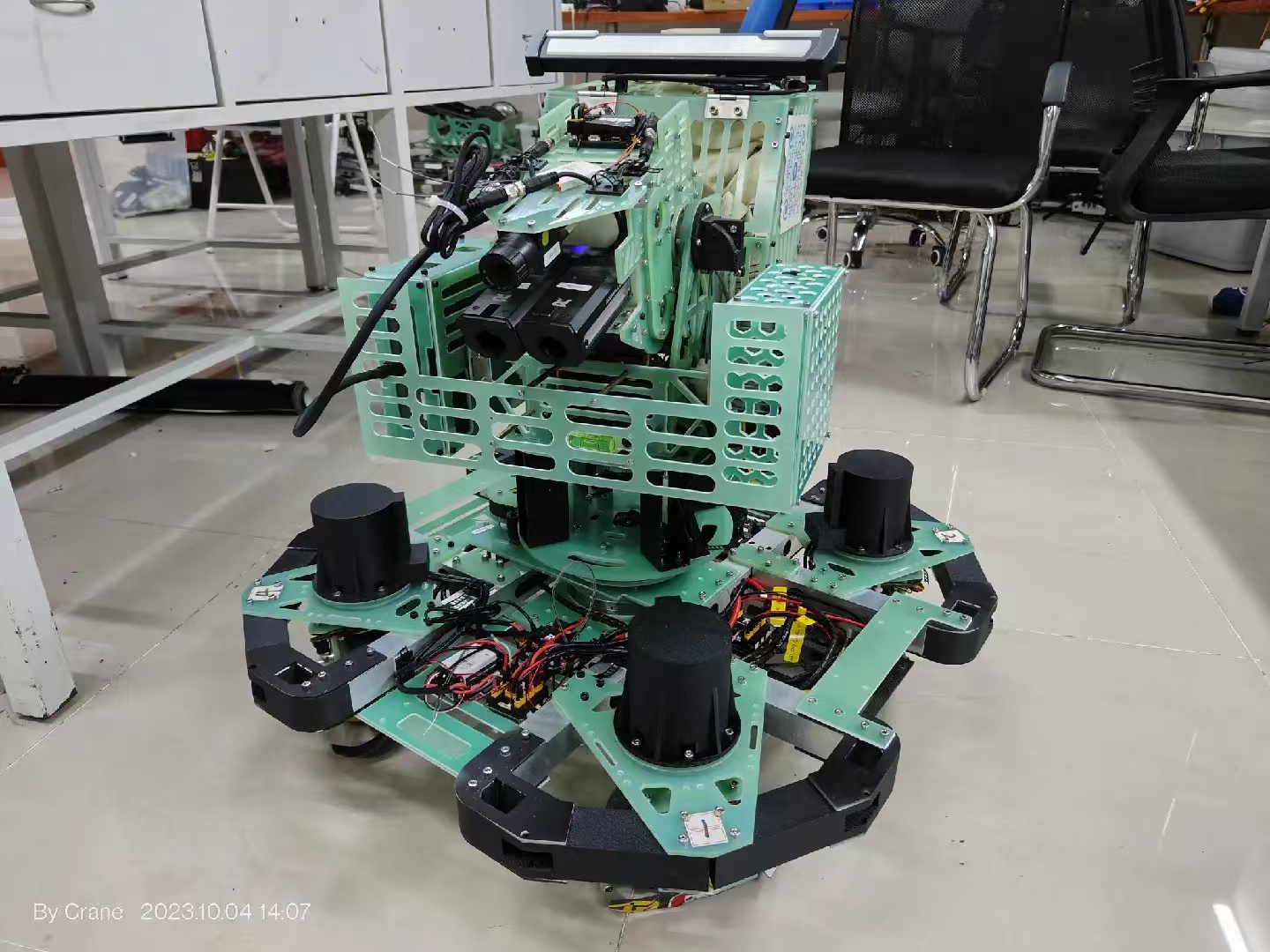
Synchro-drive robot with a 5-DoF arm
An omnidirectional robot integrating four synchro-drive wheel sets with a yaw-pitch-pitch-roll-yaw arm. Beyond the mechanics, I built the encoder/distribution PCB, STM32 chassis kinematics and PID control, and YOLOv7-based recognition.
Industry experience

Humanoid simulation & mechanism research
Simulation and mechanical research on the Ultron V3.0 humanoid: workspace analysis with GJK collision detection, full-body joint-torque studies in MuJoCo and Simscape, and graph-grammar-based morphology optimization built on RoboGrammar.

Humanoid head & dexterous hand engineering
A 3-DoF neck stabilizer designed from humanoid kinematic constraints, statics simulation and CNC structural optimization for a full-DoF exoskeleton arm, and endurance testing of a 20+ DoF dexterous robotic hand.

Follicle-holding mechanism for a medical robot
Led the mechanical redesign of a hair-transplantation robot's follicle-holding mechanism: fewer motors, better space efficiency, and a production-ready spring-based locking mechanism validated in simulation and adopted directly into product.
Competition robotics — RoboMaster
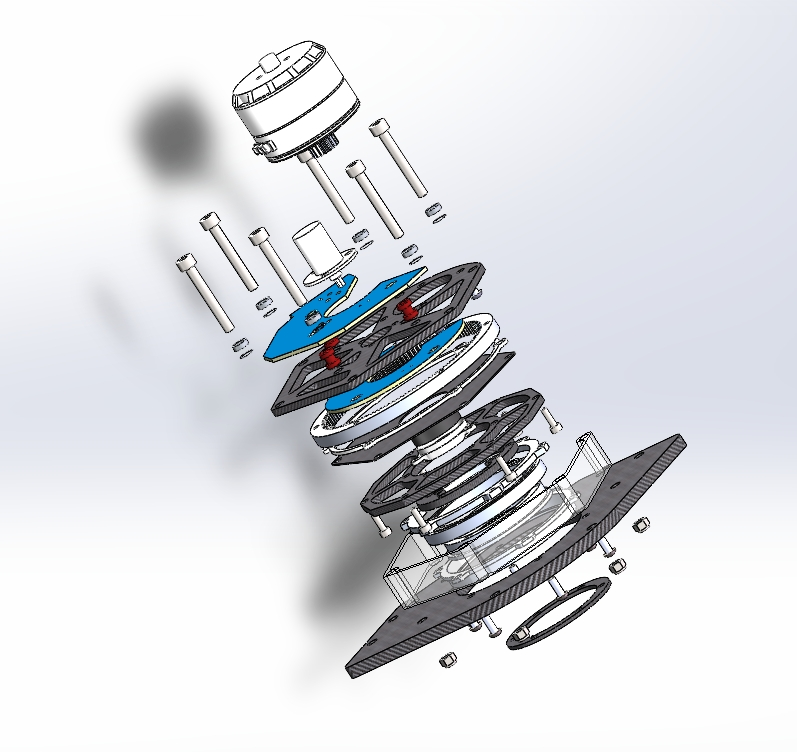
Drivetrain deep dive: wheel sets & planetary gearbox
Four generations of synchro-drive wheel sets — Watt-linkage suspension to an integrated hub motor — plus a from-scratch 2K-H planetary gearbox (10.16:1). 45.5% weight cut; chassis spin time 1.0 s → 0.3 s per revolution.
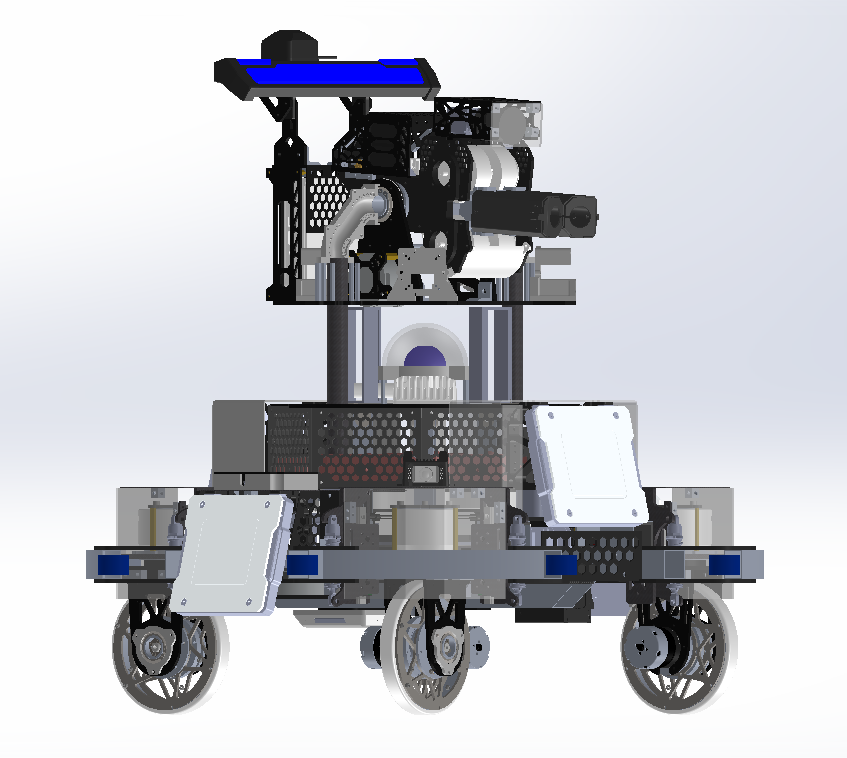
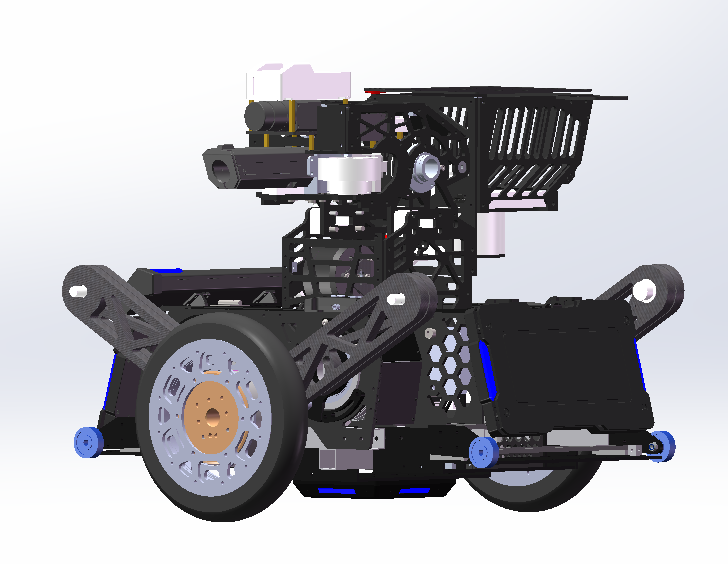
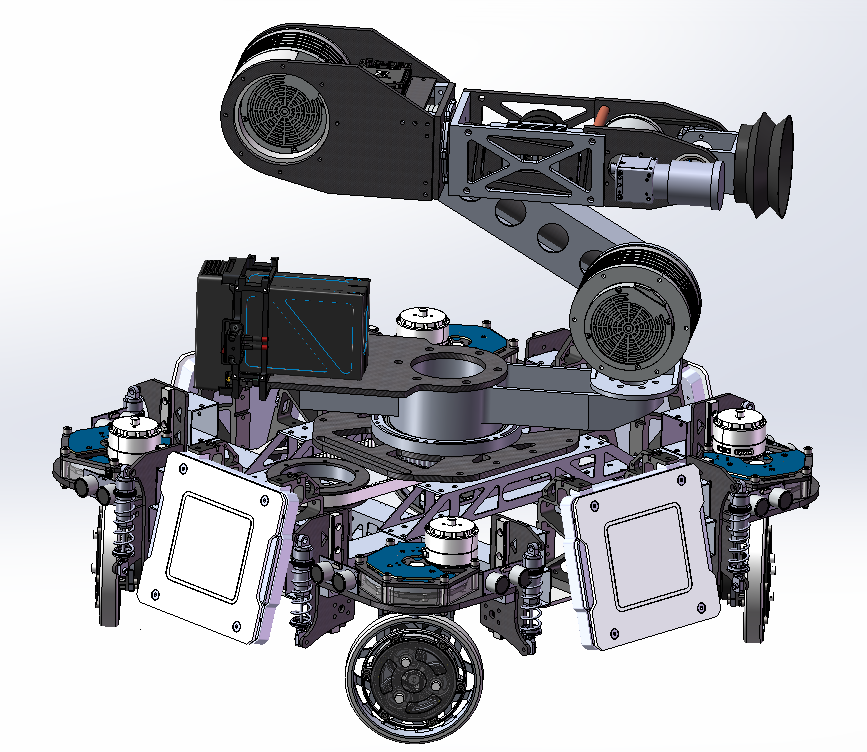
RoboMaster sentry robot, 2025 season
The third-generation sentry: systematic panel lightweighting and whole-machine stability improvements on the proven 2024 architecture, carrying the sentry category to a second national first prize.
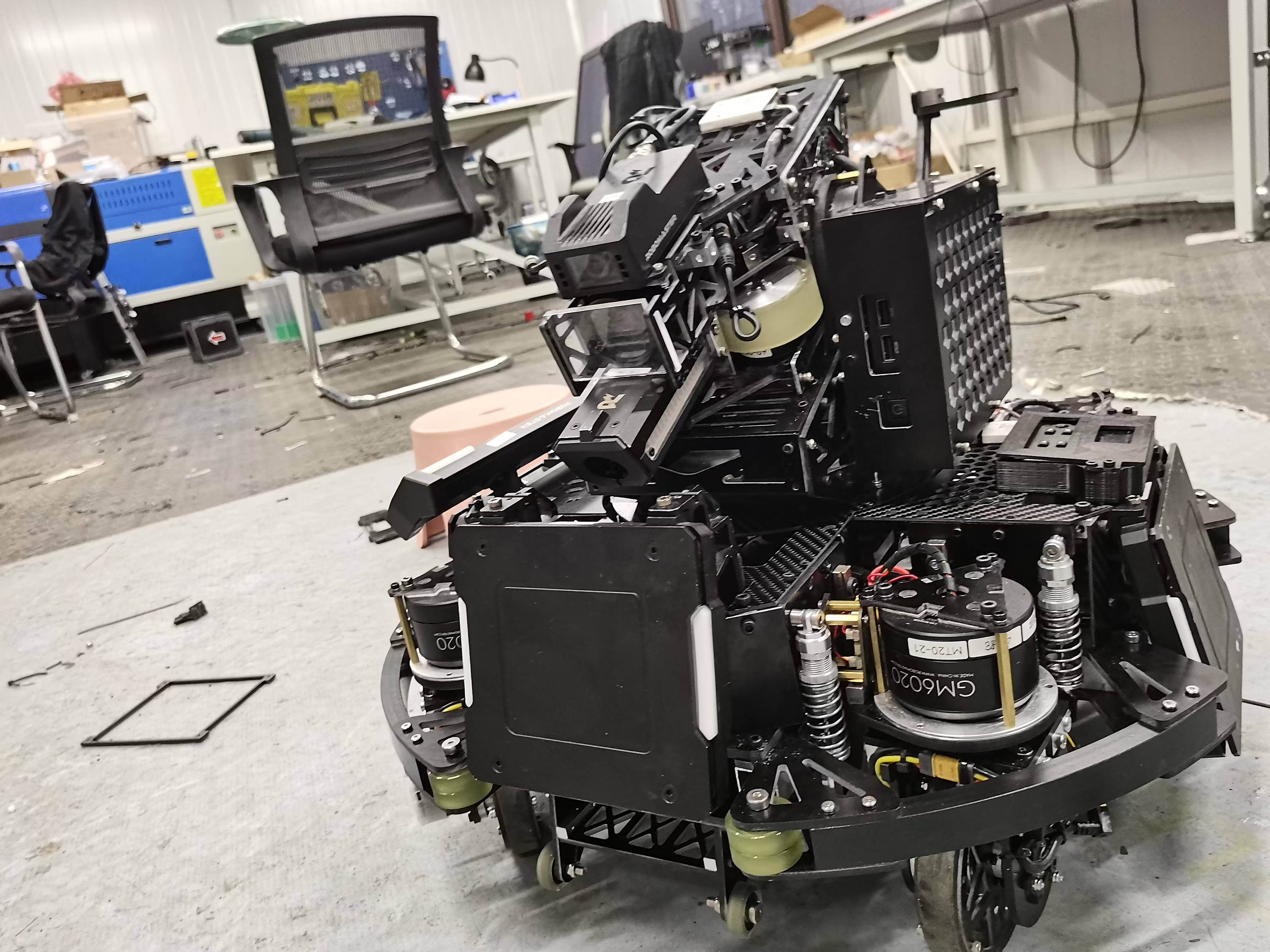
RoboMaster sentry robot, 2023–2024
Clean-sheet design of an autonomous sentry with a custom synchro-drive chassis and LiDAR navigation, then a full second-season iteration: lighter wheel sets, recentered gimbal mass, five-camera surround perception, and tuned suspension.
RoboMaster infantry robot, 2024
Redesign of a legacy Mecanum-wheel platform around the team's synchro-drive drivetrain. Relocating the magazine onto the yaw axis cut gimbal moment of inertia by over 40%; the robot spins at 0.3 s/rev under a 100 W chassis power limit.