A Brief Introduction to RM
The RoboMaster is a robotic competition held by the DJI and later on by the Committee of the Chinese university robot competition.
In the The RoboMaster University Championship (RMUC) , participating teams will independently develop different types of robots with various functions to face off on the battlefield. Each team’s participants will control their robots to attack the opponent’s robots and Base by launching projectiles. At the end of the match, the team with the highest remaining Base HP wins.
There are overall 7 classes of robots: Hero, Infantry, Engineer, Sentry, Dart system, Radar system and Drone.
Analysis of robot performance in the 2023 season
After the competition in 2023, conclusions about the first version of the robot have been drawn as:
- Urgent need of lightweight design. The former robot have reached the weight limit of 28.5kg, thus some glass fiber boards have to use carbon fiber to reduce weight.
- The center of gravity of the robot head needs to be reconfigured. In 2023, the robot will run backwards when having the chassis and gimbal decoupled and the chassis rotating. This is because the magazine of the robot is placed on one side of the gimbal, leading to the gimbal’s center of gravity to shift to one side.
- Stability and accuracy of the robot, such as launching accuracy and joint commissioning with the electronic control, need to be further polished and improved.
The iteration of the sentry robot. 2024
Due to the analysis above, the sentry for 2024 season choose to make the following changes:
- Change the position of the nacelle to center it on the yaw axis to reduce the moment of inertia.
- For the chassis, wheel sets are the heaviest parts. The wheel sets have 2 new versions to reduce weight. For the gimbal, more boards have undergone static analysis to further reduce weight.
- Changed the design of the yaw axis to simplify the progress of changing the bearing.
The new sentry also have changes to better performance:
- For omnidirectional perception capability, a system consisting of a total of five cameras was designed on the yaw axis of the robot.
- The Next Unit of Computing(NUC) is replaced to balance the gimbal while lowering the center of gravity.
- Suspension system are added and tuned to fit the working condition.
Images of the robot
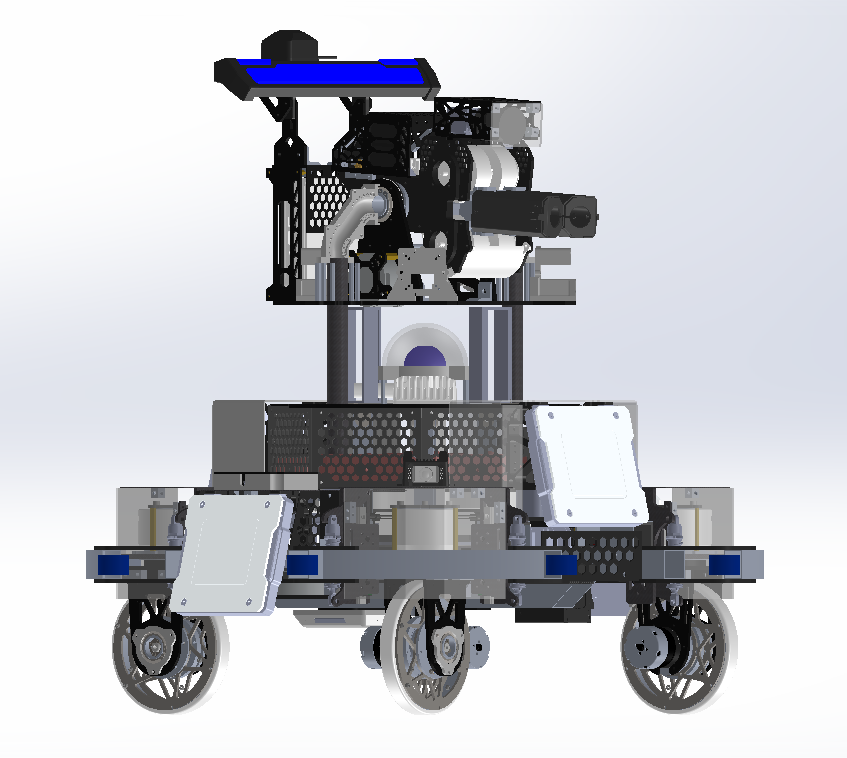
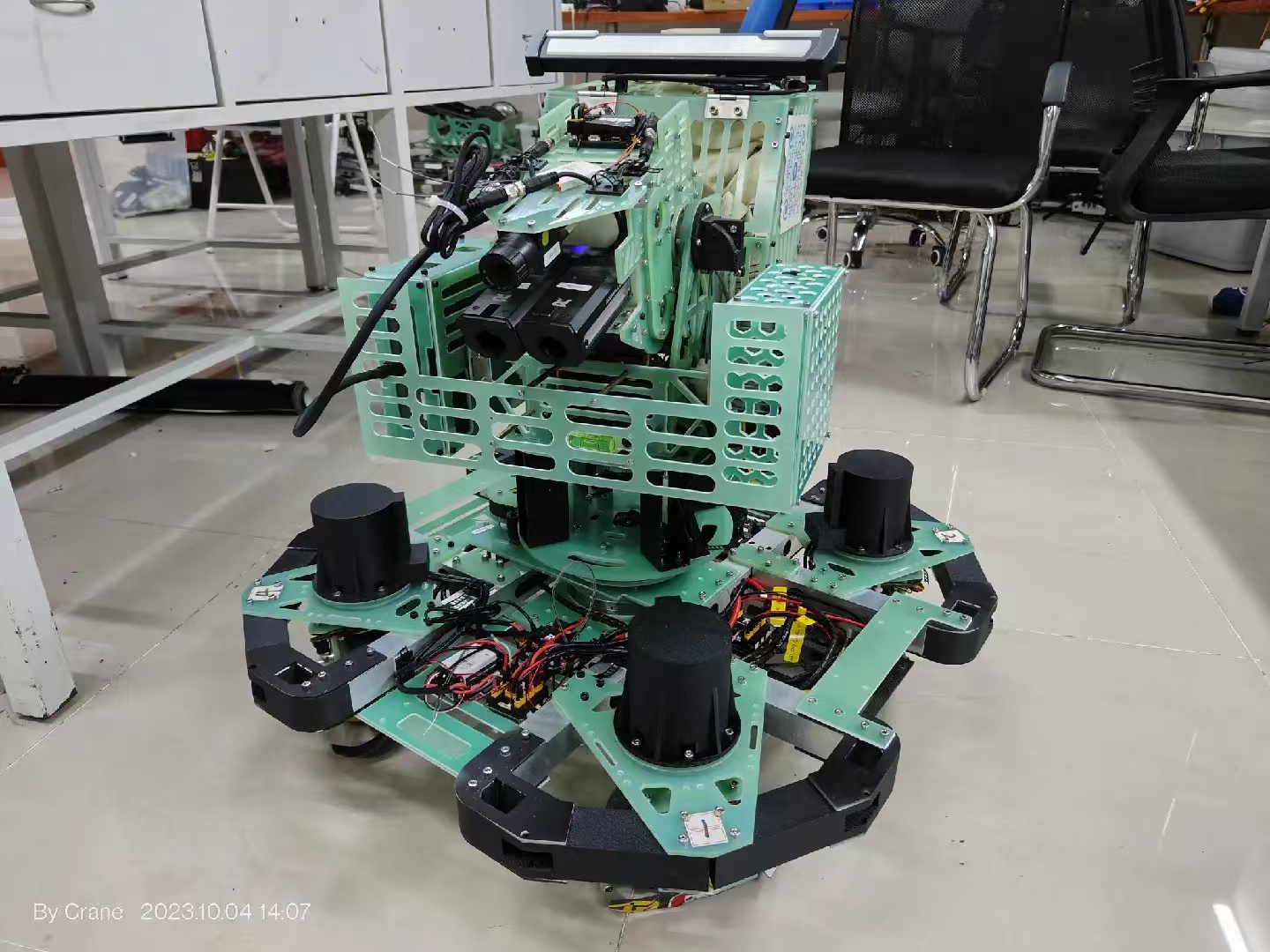
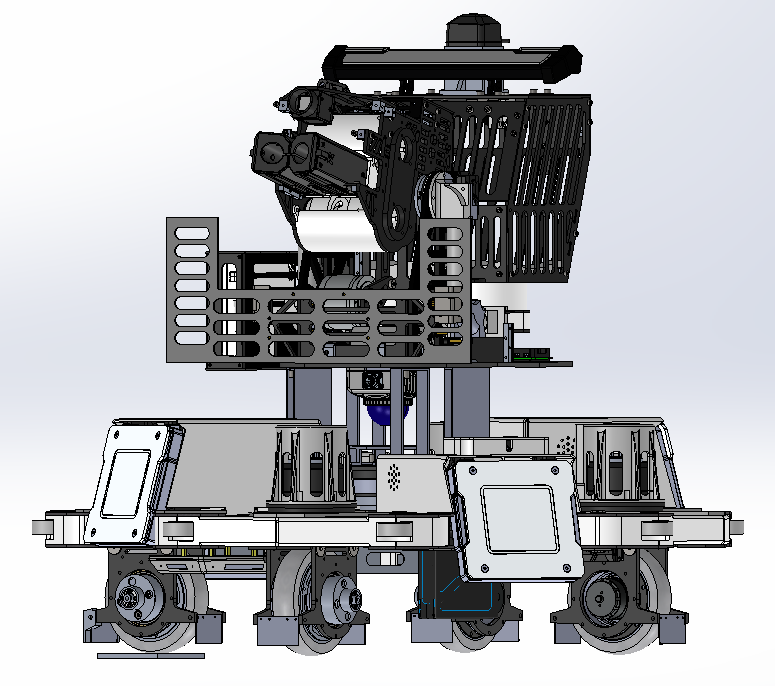
related images: sentry v5(left), image of sentry v4(middle), sentry v4(right)