Brief introduction to the project
This project is one of the projects in the Shanghai innovation program. For the purpose of tackling more complex terrain and maintaining speed, my teammate and I take a three-cylinder, five-link, two-wheel-leg chassis. This design can also serve as the ‘balance infantry’ in RoboMaster after slight modifications.
In this project, I was responsible for the mechanical design, including the rod length design of the connecting rod, motor selection, and so on. The electric control part was done by my teammates.
Videos of the design
The video of roll adjustment(top left), moving(top right) and standing up(bottom left) of the robot
Images of the design
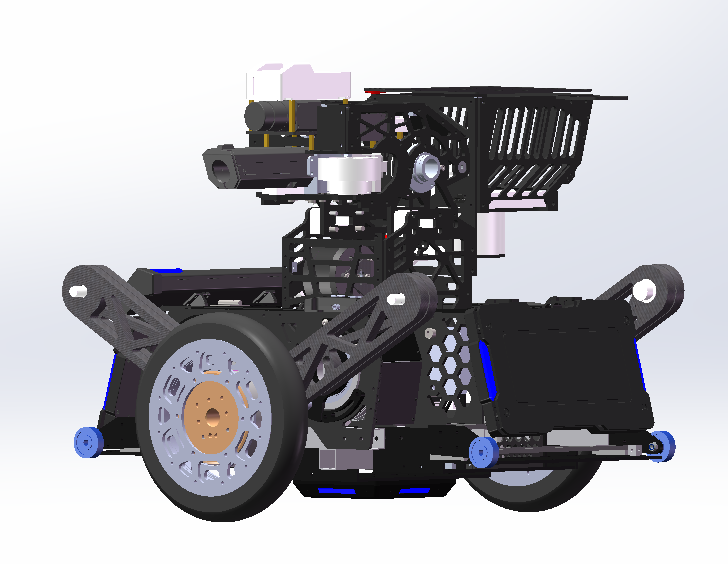
The image of the design of this robot.